Novanta社のINGENIAブランドは、医療機器、ロボティクス、産業オートメーション分野において、高精度・高効率なモーション制御技術を提供しています。特にDCサーボドライブ製品は、小型・高性能・安全性を兼ね備えた設計で、世界中のOEMやシステムインテグレーターから高い評価を得ています。
製品シリーズについて
Denaliシリーズ
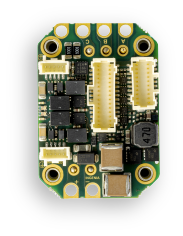
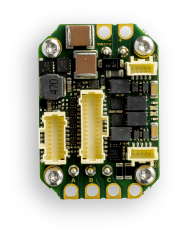
世界最小クラスのサーボドライブとして知られるDenaliは、超小型・高効率・低消費電力を実現。ピーク電流10A(NET)、20A(XCR)。質量わずか3.86g(NET)、25.6g(XCR)、PWM周波数最大200kHz、EtherCAT/CANopen通信対応で、医療機器やサービスロボットなどスペース制約のある用途に最適です 。XCRはコネクタ付きとなります。

Denali NET

Denali XCR
| 項目 | Denali NET | Denali XCR |
|---|---|---|
| 通信方式 | EtherCAT / CANopen(分散型) | EtherCAT / CANopen(集中型) |
| 電源電圧 | 5~48 VDC(最大60VDCピーク) | 5~48 VDC(最大60VDCピーク) |
| 連続電流 | 5 A(1秒) | 5 A(1秒) |
| スタンバイ消費電力 | >=1.1 W | 約2.1~2.5 W |
| ピーク電流 | 10 A(1秒) | 20 A(1秒) |
| 寸法 | 33 mm × 17.6 mm × 6 mm | 49.8 mm × 23.2 mm × 14.7 mm |
| 質量 | 3.86 g | 25.6 g |
| PWMスイッチング周波数 | 20, 50, 100, 200 kHz | 20, 50, 100, 200 kHz |
| 機能安全 | STO(Safe Torque Off) SIL3 PLe | STO(Safe Torque Off) SIL3 PLe |
| フィードバック対応 | Digital Halls, Quadrature Incremental Encoder, BiSS-C, SSI | Digital Halls, Quadrature Incremental Encoder, BiSS-C, SSI |
| 効率 | 99% | 99% |
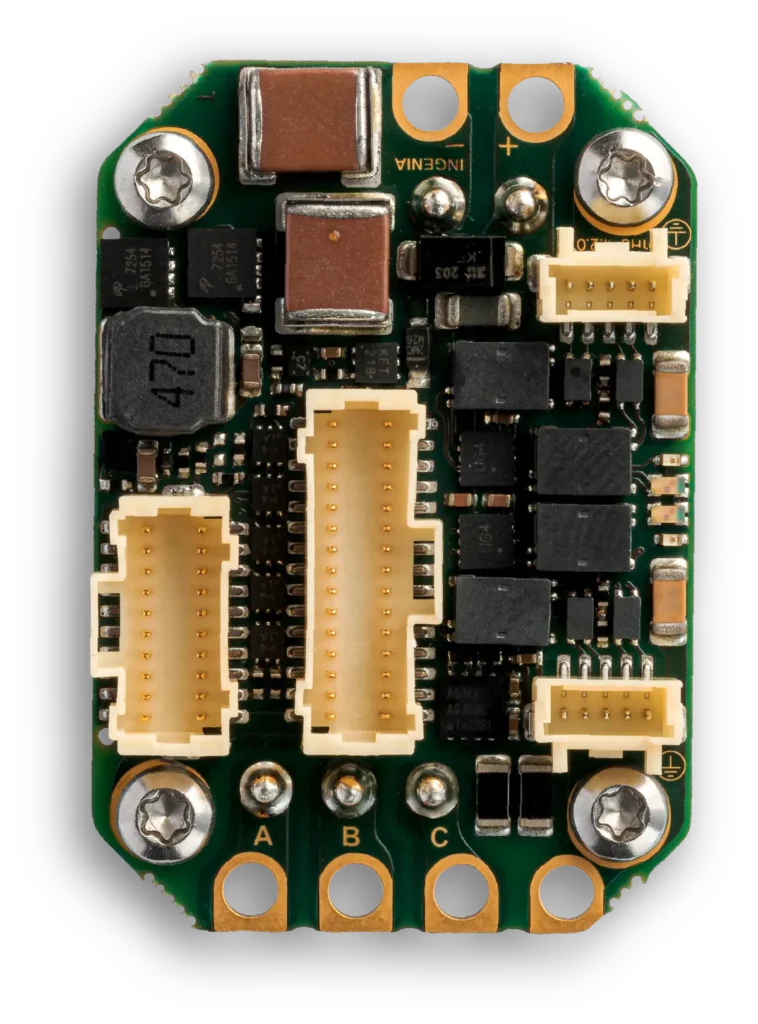
Capitanシリーズ
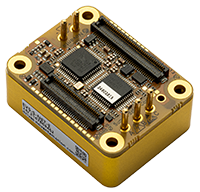
Capitanは、高性能と低EMI(電磁干渉)を両立した設計で、高速応答性と優れた電力管理を提供。PWM周波数最大200kHz、最大45Aの連続電流に対応し、産業用ロボットや協働ロボットに理想的です

Capitan CORE
| 項目 | Capitan CORE |
|---|---|
| 通信方式 | SPI |
| 電源電圧 | 8~48 VDC(最大60VDCピーク) |
| 連続電流 | 10 A(1秒) |
| スタンバイ消費電力 | >=1.12W |
| PWMスイッチング周波数 | 20 / 50 / 100 / 200 kHz |
| モータタイプ | DCブラシ付き、ロータリーブラシレス |
| 寸法 | 34.5 mm × 26 mm × 10.3 mm |
| 質量 | 18 g |
| 機能安全 | STO, SIL3 PLe |
| フィードバック対応 | Digital Halls, Quadrature Incremental Encoder, BiSS-C, SSI |
| 効率 | 99% |
Capitan NET
Capitan XCR
| 項目 | Capitan NET | Capitan XCR |
|---|---|---|
| 通信方式 | EtherCAT、CANopen | EtherCAT、CANopen |
| 電源電圧 | 8~48 VDC(最大60VDCピーク) | 8~48 VDC(最大60VDCピーク) |
| 連続電流 | 10 A(1秒) | 10 A(1秒) |
| スタンバイ消費電力 | >=1.28W | >=1.5W |
| PWMスイッチング周波数 | 20 / 50 / 100 / 200 kHz | 20 / 50 / 100 / 200 kHz |
| モータタイプ | DCブラシ付き、ロータリーブラシレス | DCブラシ付き、ロータリーブラシレス |
| 寸法 | 34.5 mm × 26 mm × 10.3 mm | 42 mm × 29 mm × 19.4 mm |
| 質量 | 18 g | 38 g |
| 機能安全 | STO, SIL3 PLe | STO, SIL3 PLe |
| フィードバック対応 | Digital Halls, Quadrature Incremental Encoder, BiSS-C, SSI | Digital Halls, Quadrature Incremental Encoder, BiSS-C, SSI |
| 効率 | 99% | 99% |
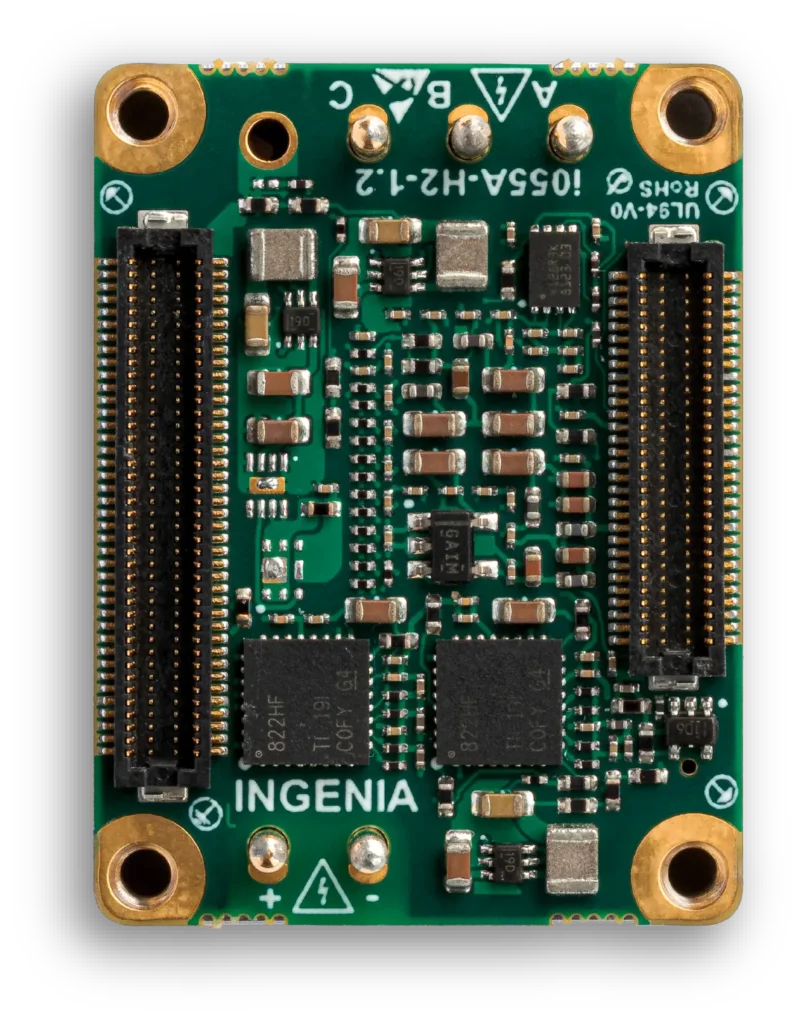
Everest
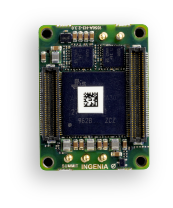
Everestは、高密度・高効率設計で、99%の効率と低スタンバイ電力(1W)を実現。SPI通信による高速制御や、CANopen/EtherCAT対応のモジュール型設計で、多軸制御や高精度な産業用途に最適です

Everest CORE
| 項目 | Everest CORE |
|---|---|
| 通信方式 | SPI |
| 連続電流 | 45 A(1秒) |
| ピーク電流 | 60 A (1秒) |
| 電源電圧 | 最大48VDC |
| 寸法 | 26 mm × 34.5 mm × 17 mm |
| 質量 | 16 g |
| モータタイプ | DCブラシ付き、ロータリーブラシレス |
| フィードバック対応 | Digital Halls, Quadrature Incremental Encoder, BiSS-C, SSI |
| 効率 | 99% |
Everest NET
Everest XCR
| 項目 | Everest NET | Everest XCR |
|---|---|---|
| 通信方式 | EtherCAT、CANopen | EtherCAT、CANopen |
| 連続電流 | 45 A(1秒) | 45 A(1秒) |
| ピーク電流 | 60 A (1秒) | 60 A (1秒) |
| 電源電圧 | 最大48VDC | 最大48VDC |
| 寸法 | 26 mm × 34.5 mm × 17 mm | 29 mm × 42 mm × 23 mm |
| 質量 | 24 g | 38 g |
| モータタイプ | DCブラシ付き、ロータリーブラシレス | DCブラシ付き、ロータリーブラシレス |
| フィードバック対応 | Digital Halls, Quadrature Incremental Encoder, BiSS-C, SSI | Digital Halls, Quadrature Incremental Encoder, BiSS-C, SSI |
| 効率 | 99% | 99% |
Everest S
Everest Sは、世界最小の高性能サーボドライブとして、50kHzの電流ループ、25kHzの速度ループを搭載。**SIL-3 PLe認証のSTO(Safe Torque Off)**機能も備え、医療・精密機器分野での安全性と性能を両立します 。
詳細説明ページ:英語
Everest S NET
Everest S XCR
| 項目 | Everest S NET | Everest S XCR |
|---|---|---|
| 通信方式 | EtherCAT、CANopen | EtherCAT、CANopen |
| 電源電圧 | 8~72 VDC(最大80VDCピーク) | 8~72 VDC(最大80VDCピーク) |
| 連続電流 | 45 A(1秒) | 45 A(1秒) |
| スタンバイ消費電力 | >=1.12W | >=1.53W |
| PWMスイッチング周波数 | 10 / 20 / 50 / 100 kHz | 10 / 20 / 50 / 100 kHz |
| モータタイプ | DCブラシ付き、ロータリーブラシレス | DCブラシ付き、ロータリーブラシレス |
| 寸法 | 34.5 mm × 26 mm × 10.3 mm | 42 mm × 29 mm × 19.4 mm |
| 質量 | 18 g | 31 g |
| フィードバック対応 | Digital Halls, Quadrature Incremental Encoder, BiSS-C, SSI | Digital Halls, Quadrature Incremental Encoder, BiSS-C, SSI |
| 効率 | 99% | 99% |
Denali Safe
Denaliの安全機能強化版であるDenali Safeは、**FSoE(Functional Safety over EtherCAT)**を含む多彩な安全機能を搭載。SS1, SS2, SOS, SLP, SLS, SP, SVなどの安全制御に対応し、手術用ロボットやラボ機器など、信頼性が求められる用途に最適です

Denali Safe
| 項目 | Denali Safe |
|---|---|
| 通信方式 | EtherCAT |
| 電源電圧 | 5~48 VDC(最大60VDCピーク) |
| 連続電流 | 5 A(1秒) |
| ピーク電流 | 10A(1秒) |
| スタンバイ消費電力 | >=2W |
| PWMスイッチング周波数 | 20 / 50 / 100 / 200 kHz |
| モータタイプ | DCブラシ付き、ロータリーブラシレス |
| 寸法 | 33 mm × 17.6 mm × 9.5 mm |
| 質量 | 18 g |
| フィードバック対応 | Digital Halls, Quadrature Incremental Encoder, BiSS-C, SSI |
| 効率 | 99% |
| 安全機能(フィードバック非依存) | STO, SI, SOUT, SS1-t, FSoE (SIL3 PLd CAT3) |
| 安全機能(フィードバックに依存) | SS1-r, SS2-t, SS2-r, SOS, SLA, SAR, SLS, SSR, SLP, SLI, SDI, SV, SSM (SIL3 PLd CAT3) |
Everest S Safe
Everest Sの安全強化モデル。最大45Aの連続電流、99%の効率、1.7Wのスタンバイ消費電力を実現しながら、最先端の安全機能を搭載。高精度・高安全性が求められる産業・医療分野において、最適な選択肢です
Everest S Safe
| 項目 | Denali Safe |
|---|---|
| 通信方式 | EtherCAT |
| 電源電圧 | 5~48 VDC(最大60VDCピーク) |
| 連続電流 | 5 A(1秒) |
| ピーク電流 | 10A(1秒) |
| スタンバイ消費電力 | >=2W |
| PWMスイッチング周波数 | 20 / 50 / 100 / 200 kHz |
| 寸法 | 33 mm × 17.6 mm × 9.5 mm |
| 質量 | 7 g |
| フィードバック対応 | Digital Halls, Quadrature Incremental Encoder, BiSS-C, SSI |
| 効率 | 99% |
| 安全機能(フィードバック非依存) | STO, SI, SOUT, SS1-t, FSoE (SIL3 PLd CAT3) |
| 安全機能(フィードバックに依存) | SS1-r, SS2-t, SS2-r, SOS, SLA, SAR, SLS, SSR, SLP, SLI, SDI, SV, SSM (SIL3 PLd CAT3) |
主なアプリケーション
IngeniaのDCサーボドライブは、以下のような分野で活躍しています:
- 医療・手術用ロボット:精密な制御と安全性が求められる環境に最適
- AGV/AMR(自律搬送ロボット):高効率・高応答性で物流の自動化を支援
- サービスロボット/協働ロボット:コンパクト設計と高性能制御で柔軟な動作を実現
- エクソスケルトン/ヒューマノイド:低消費電力と高精度制御が求められるウェアラブル機器に対応
- 半導体・検査装置:高周波・高精度な動作が求められる工程に最適
Novanta IngeniaのDCサーボドライブは、次世代のスマートモーション制御を支える中核技術です。
導入をご検討の方は、ぜひ弊社までお問い合わせください。

