ATIの力覚センサ:
■ 世界トップレベルのシェア
■ 宇宙産業や多くの学術分野でも多く採用されている圧倒的高品質の製品
分解能 約 1/6100 (定格容量比での、全製品平均値)
精度 2%(非直線性及び、他軸感度も含まれての精度)
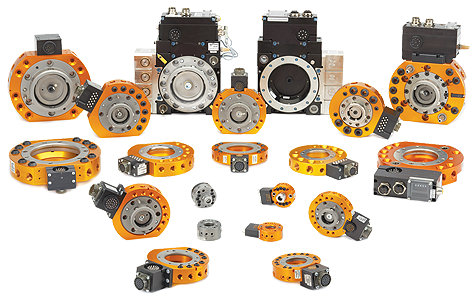
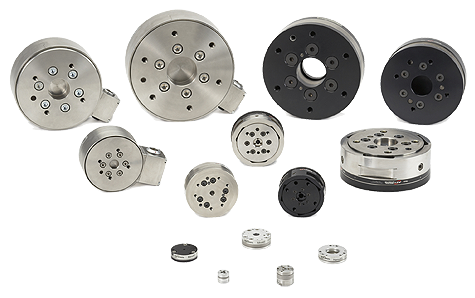
■ 豊富なラインナップ
■ 高速通信
力覚センサ(Force Torque)とは
力覚センサ(Force Sensor、FTセンサー、力センサ、)は、物体にかかる力とトルクを測定するためのセンサです。これは、物体が他の物体に対して加える力や圧力の量や方向を検知することができます。力覚センサは、ロボット工学、医療、製造業など、さまざまな分野で広く利用されています。
ATI社の製品は、X、Y、Zの3軸の荷重とモーメント(トルク)の6軸を同時に検出するセンサです。グローバルではトップレベルのシェアを保有しています。
使用用途
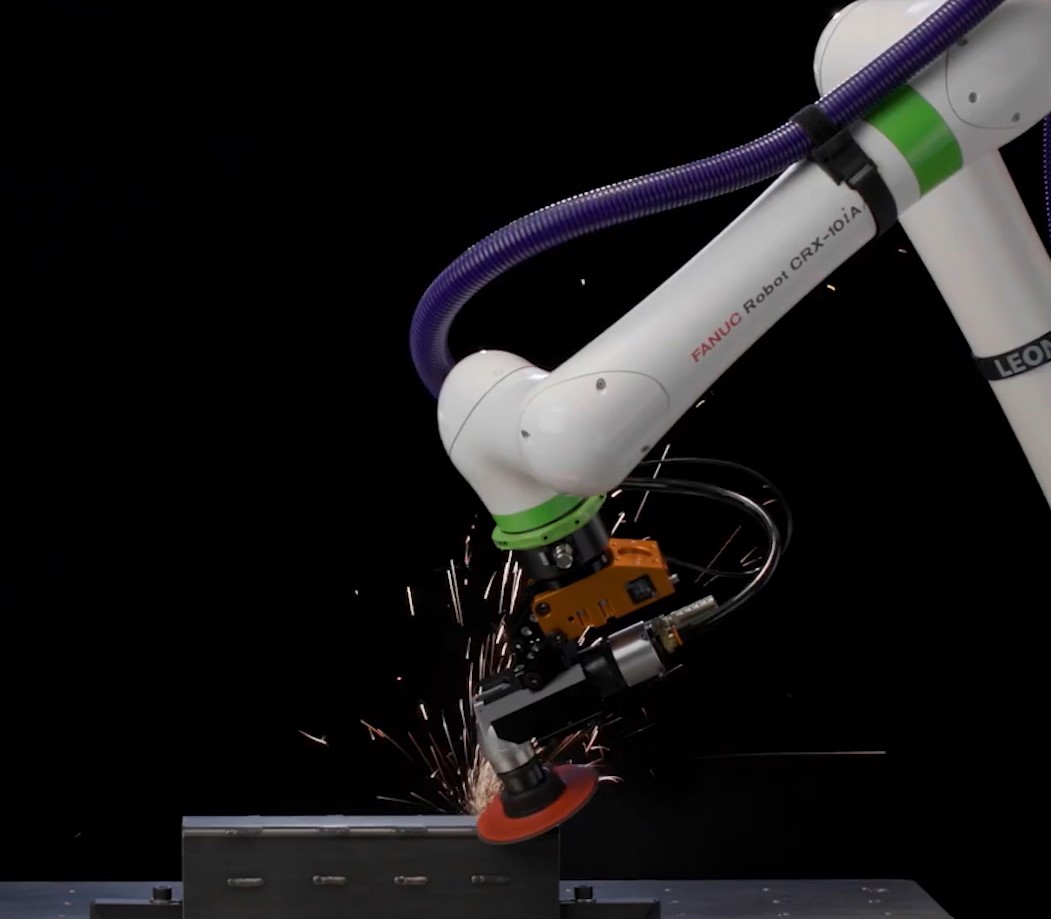
- ロボット工学
- 生体力学
- 神経学と運動制御
- リハビリテーション
- ハプティクス(触覚技術)
- 外科手術
- 風洞と飛行機械
- ヒューマノイドロボット
- 歯科矯正の応用
ATI社では火星探査機でも採用されFTセンサがあり、宇宙産業でも活用されています。


センサ方式
力覚センサの動作原理は、さまざまな方式がありますが、一般的な原理は、変形やひずみを利用して力を検出することです。以下に、いくつかの一般的な力覚センサの方式を紹介します。
負荷セル(Load Cell)
負荷セルは、一般的な力覚センサの一種です。通常、金属製の弾性体を使用し、物体にかかる力によって変形させます。変形した弾性体は、ひずみゲージと呼ばれるセンサを介して測定されます。ひずみゲージは、変形に応じて抵抗値が変化する特性を持っています。そのため、ひずみゲージの抵抗値の変化を測定することで、加わる力を推定することができます。
ATI社の製品はこの方式を採用しています。コンパクトで頑丈なトランスデューサは、シリコン歪みゲージを用いて力を感知します。トランスデューサのシリコン歪みゲージはノイズ耐性が高く、優れた過負荷保護をもたらします。これは全モデルで標準となっています。
圧電センサ(Piezoelectric Sensor)
圧電センサは、圧力や力を電気信号に変換するセンサです。圧電効果を利用しており、圧力が加わるとセンサ内の圧電素子が変形し、電荷が生成されます。この電荷は、電圧信号として測定され、力の大きさや方向を推定することができます。
容量センサ(Capacitive Sensor)
容量センサは、物体にかかる力によって変化する容量を検出するセンサです。センサ内には、固定された電極と物体によって形成される可変電極があります。物体にかかる力によって可変電極の位置や形状が変化し、それに伴って容量も変化します。この容量の変化を検出することで、加わる力を測定することができます。
これらの力覚センサは、それぞれ異なる応用領域に適しています。たとえば、負荷セルは、重量測定やトルク測定などの産業用途で広く使用されています。一方、圧電センサは、振動計測や衝撃計測、さらには医療分野での生体力学的な応用に使用されることがあります。
ATI社の製品特徴
- 過負荷保護: F/Tトランスデューサは極めて頑丈で耐久性があります。すべてのトランスデューサモデルが大きな過負荷に耐えられます。
- 高S/N比: 従来の歪みゲージの75倍の強度の信号をもたらします。この信号は増幅されても生じるノイズ歪みはほぼゼロです。
- 高分解能: 高分解能の性能が、より感度の高いセンシングをご提供可能です。分解能 約 1/6100 (定格容量比での、全製品平均値)となります。
- 精度の高さ: 多くの製品で、フルスケール2%以内(非直線性及び、他軸感度も含まれての精度)に収まる精度を実現しています。
- 多様なシステムインターフェースに対応:Net F/Tを使用し、Ethernet、Ethernet/IP、DeviceNet、CAN BUSシステムに接続可能です。またオプションとしてPROFINETにも接続可能です。他、RS-485シリアルインターフェースへも対応可能です。
PCI、PCIe、PXI、USBなど、標準データ取得カードを介してDAQ F/Tとしても使用可能。
また、TWE(Transducer without electric)システムは、特殊OEMや研究アプリケーションへご提供しています。 - カスタムF/Tトランスデューサ お客様の使用に合わせて設計、構築できます。
- アプリケーションのお手伝い 経験豊かなエンジニアが対応します。


ラインナップ
| モデル | 定格 Fx,Fy | 定格 Fz | 定格 Tx,Ty | 質量 | 直径 | 高さ |
|---|---|---|---|---|---|---|
| Axia80-M8 | ±150 N | ±470 N | ±8 Nm | 0.28 kg | 82 mm | 25.4 mm |
| Axia80-M20 | ±500 N | ±900 N | ±20 Nm | 0.3 kg | 82 mm | 25.4 mm |
| Axia90-M50 | ±1000 N | ±2000 N | ±50 Nm | 0.78 kg | 89.9 mm | 26.9 mm |
| Axia80-M50 | ±1200 N | ±2000 N | ±50 Nm | 0.68 kg | 82 mm | 25.4 mm |
| Axia130-M125 | ±2000 N | ±4000 N | ±125 Nm | 0.86 kg | 130 mm | 39.2 mm |
| Axia130-M300 | ±4000 N | ±6000 N | ±300 Nm | 1.88 kg | 130 mm | 39.2 mm |
| Nano17 Titanium | ±32 N | ±56.4 N | ±200 Nmm | 0.0101 kg | 17 mm | 14.5 mm |
| Nano17 | ±50 N | ±70 N | ±500 Nmm | 0.00907 kg | 17 mm | 14.5 mm |
| Nano17 IP65/IP68 | ±50 N | ±70 N | ±500 Nmm | 0.0408 kg | 20.1 mm | 22.2 mm |
| Nano25 | ±250 N | ±1000 N | ±6 Nm | 0.0634 kg | 25 mm | 21.6 mm |
| Nano25 IP65/IP68 | ±250 N | ±1000 N | ±6 Nm | 0.136 kg | 28 mm | 27.5 mm |
| Nano43 | ±36 N | ±36 N | ±500 Nmm | 0.0387 kg | 43 mm | 11.5 mm |
| Mini27 Titanium | ±80 N | ±160 N | ±4 Nm | 0.0334 kg | 27 mm | 18.2 mm |
| Mini40 | ±80 N | ±240 N | ±4 Nm | 0.0499 kg | 40 mm | 12.2 mm |
| Mini40 IP65/IP68 | ±80 N | ±240 N | ±4 Nm | 0.272 kg | 53.3 mm | 21.1 mm |
| Mini43LP | ±250 N | ±250 N | ±3 Nm | 0.0512 kg | 43 mm | 7.9 mm |
| Mini45 Titanium | ±240 N | ±480 N | ±12 Nm | 0.0998 kg | 45 mm | 17.5 mm |
| Mini45 | ±580 N | ±1160 N | ±20 Nm | 0.0917 kg | 45 mm | 15.7 mm |
| Mini45 IP65/IP68 | ±580 N | ±1160 N | ±20 Nm | 0.391 kg | 57.9 mm | 25.1 mm |
| Mini58 | ±2800 N | ±6800 N | ±120 Nm | 0.345 kg | 58 mm | 30 mm |
| Mini58 IP60 | ±2800 N | ±6800 N | ±120 Nm | 0.522 kg | 82 mm | 36.2 mm |
| Mini58 IP65/IP68 | ±2800 N | ±6800 N | ±120 Nm | 0.804 kg | 65.4 mm | 37.6 mm |
| Mini85 | ±1900 N | ±3800 N | ±80 Nm | 0.635 kg | 85.1 mm | 29.8 mm |
| Gamma | ±130 N | ±400 N | ±10 Nm | 0.255 kg | 75.4 mm | 33.3 mm |
| Gamma IP60 | ±130 N | ±400 N | ±10 Nm | 0.467 kg | 99.1 mm | 39.6 mm |
| Gamma IP65 | ±130 N | ±400 N | ±10 Nm | 1.09 kg | 111 mm | 52.3 mm |
| Gamma IP68 | ±130 N | ±400 N | ±10 Nm | 1.98 kg | 111 mm | 52.3 mm |
| Delta | ±660 N | ±1980 N | ±60 Nm | 0.913 kg | 94.5 mm | 33.3 mm |
| Delta IP60 | ±660 N | ±1980 N | ±60 Nm | 1.81 kg | 117 mm | 47.1 mm |
| Delta IP65 | ±660 N | ±1980 N | ±60 Nm | 1.77 kg | 126 mm | 52.2 mm |
| Delta IP68 | ±660 N | ±1980 N | ±60 Nm | 2.63 kg | 102 mm | 52.2 mm |
| Omega85 | ±1900 N | ±3800 N | ±80 Nm | 0.658 kg | 85.1 mm | 33.4 mm |
| Omega85 IP65/IP68 | ±1900 N | ±3800 N | ±80 Nm | 1.91 kg | 92.7 mm | 38.7 mm |
| Omega160 | ±2500 N | ±6250 N | ±400 Nm | 2.72 kg | 157 mm | 55.9 mm |
| Omega160 IP60 | ±2500 N | ±6250 N | ±400 Nm | 7.67 kg | 194 mm | 57.7 mm |
| Omega160 IP65/IP68 | ±2500 N | ±6250 N | ±400 Nm | 7.26 kg | 165 mm | 65.9 mm |
| Omega191 | ±7200 N | ±18000 N | ±1400 Nm | 9.41 kg | 190 mm | 64 mm |
| Omega191 IP60 | ±7200 N | ±18000 N | ±1400 Nm | 14.1 kg | 238 mm | 73.7 mm |
| Omega191 IP65/IP68 | ±7200 N | ±18000 N | ±1400 Nm | 13.2 kg | 204 mm | 74.8 mm |
| Omega250 IP60 | ±16000 N | ±32000 N | ±2000 Nm | 31.8 kg | 295 mm | 94.9 mm |
| Omega250 IP65/IP68 | ±16000 N | ±32000 N | ±2000 Nm | 31.8 kg | 295 mm | 94.9 mm |
| Omega331 | ±40 kN | ±88 kN | ±6 kNm | 47 kg | 330 mm | 107 mm |

力覚センサを導入するメリット
力の測定:
力覚センサは、物体にかかる力や圧力を正確に測定することができます。これにより、物体の重量や加わる力の大きさ、方向、変化などを把握することができます。例えば、製造業界では、製品の品質管理やロボットアームの制御に力覚センサが利用されています。
制御の精度向上
力覚センサを使用することで、機械やロボットの制御をより精密に行うことができます。例えば、力覚センサを搭載したロボットアームは、物体を傷つけることなく正確につかんだり、力の調整や接触力の制御を行ったりすることができます。これにより、危険な作業環境での作業効率の向上や品質の向上が期待できます。
フィードバック情報の取得
力覚センサは、物体にかかる力の変化をリアルタイムで検知することができます。これにより、操作者や制御システムに対して重要なフィードバック情報を提供することができます。例えば、医療分野では、手術ロボットに搭載された力覚センサが、外科医に手術中の物体への力のかけ方や触覚情報を提供し、手術の安全性と精度を向上させるのに役立っています。
物体の特性評価
力覚センサは、物体の硬さ、柔らかさ、弾力性などの特性を評価するのにも利用できます。これにより、材料の品質管理や製品の設計、開発、研究などの分野で有用な情報を提供することができます。
力覚センサは、その正確性と多様な応用範囲から、様々な分野で重要な役割を果たしています。これらのメリットは、効率向上、品質向上、安全性向上などの観点から、産業界や医療分野などで広く活用されています。
アプリケーションシート
新規プロジェクトについてのお問い合わせはの際には、下記アプリケーションシートをご提出いただいております。
下記シートを記入いただき、弊社販売店または担当者へご連絡頂きますよう宜しくお願いいたします。